
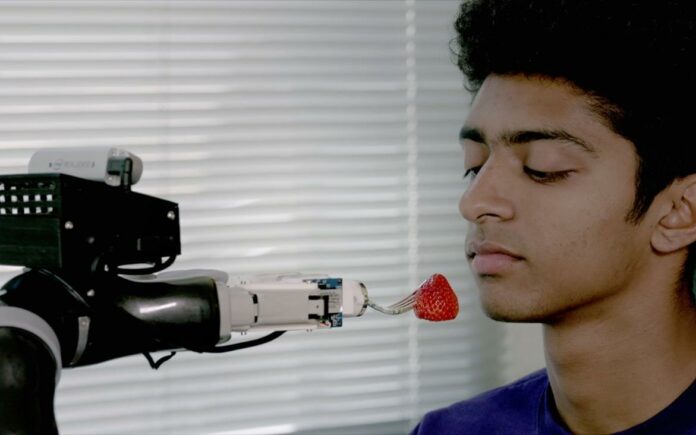
Ένα ρομποτικό σύστημα το οποίο μπορεί να ταΐζει ανθρώπους που δεν μπορούν να φάνε μόνοι τουςαναπτύσσουν ερευνητές του University of Washington.
Αφού το ρομπότ αναγνωρίσει τα διάφορα είδη φαγητού που υπάρχουν στο τραπέζι, το ρομπότ μπορεί να διαμορφώσει στρατηγική πάνω στο πώς να χρησιμοποιεί πηρούνι για να σηκώνει και να μεταφέρει τη μπουκιά στο στόμα του ανθρώπου που εξυπηρετεί.
Οι ερευνητές δημοσιοποίησαν τα αποτελέσματα της δουλειάς τους σε μια σειρά επιστημονικών άρθρων: Ένα δημοσιοποιήθηκε στο IEEE Robotics and Automation Letters και ένα παρουσιάστηκε στις 13 Μαρτίου στην ACM/IEEE International Conference on Human-Robot Interaction στη Νότια Κορέα.
«Το να εξαρτάσαι από έναν αποκλειστικό νοσοκόμο για να σε ταΐζει κάθε ημέρα στερεί την αίσθηση ανεξαρτησίας ενός ατόμου» είπε ο Σιντάρτα Σρινιβάσα, καθηγητής στο Paul G. Allen School of Computer Science & Engineering του UW. «Σκοπός μας με αυτό το πρόγραμμα είναι να παρέχουμε στους ανθρώπους λίγο περισσότερο έλεγχο πάνω στις ζωές τους».
Η κεντρική ιδέα ήταν η ανάπτυξη ενός αυτόνομου συστήματος ταΐσματος που θα μπορεί να εγκατασταθεί σε αναπηρικά καροτσάκια και να ταΐζει τους κατόχους τους όποτε αυτοί θέλουν. Στο πλαίσιο της έρευνας, έγιναν πειράματα για να διαπιστωθεί πώς τρώνε οι άνθρωποι κοινές τροφές και έτσι διαπιστώθηκε ποιες είναι οι «στρατηγικές» τους ως προς το πώς ανασηκώνουν μπουκιές φαγητού. Το ρομπότ ήταν σε θέση να ανασηκώνει τα πιο σκληρά τρόφιμα, μα είχε πρόβλημα με τα πιο μαλακά, καθώς χρειαζόταν να ρυθμίζει καλύτερα τη δύναμη που ασκούσε.
Για να σχεδιάσουν μια «στρατηγική» που μπορεί να αλλάζει ανάλογα με το είδος του φαγητού, οι ερευνητές συνδύασαν δύο διαφορετικούς αλγορίθμους: Ο πρώτος ήταν ο αλγόριθμος εντοπισμού αντικειμένων RetinaNet, ο οποίος σαρώνει το πιάτο, εντοπίζει τα είδη φαγητού σε αυτό και βάζει ένα πλαίσιο γύρω από το καθένα. Ο δεύτερος ήταν το SPNet, που εξετάζει το είδος του φαγητού εντός ενός συγκεκριμένου πλαισίου και λέει στο ρομπότ ποιος είναι ο καλύτερος τρόπος να ανασηκώσει το φαγητό. Για παράδειγμα, το SPNet λέει στο ρομπότ να τρυπήσει μια φράουλα ή ένα κομμάτι μπανάνας στη μέση, και να τρυπήσει ένα καρότο στο ένα από τα δύο άκρα.
Επί της παρούσης, η ομάδα συνεργάζεται με το Taskar Center for Accessible Technology, για να λάβει feedback από αποκλειστικούς νοσοκόμους και ασθενείς σε εγκαταστάσεις φροντίδας για τις δυνατότητες βελτίωσης του συστήματος. «Εν τέλει σκοπός μας για το ρομπότ είναι να βοηθά τους ανθρώπους να παίρνουν το γεύμα τους μόνοι τους» είπε ο Σρινιβάσα, προσθέτοντας πως σκοπός δεν είναι η αντικατάσταση των αποκλειστικών νοσοκόμων, μα η ενίσχυσή τους: «Με ένα ρομπότ να τον βοηθά, ο αποκλειστικός νοσοκόμος μπορεί να φτιάχνει το πιάτο και να κάνει μετά κάτι άλλο ενώ ο ασθενής τρώει».
Για να εμφανίζονται περισσότερα άρθρα της Ναυτεμπορικής στις αναζητήσεις σας εύκολα και γρήγορα, πρέπει να προσθέσετε το site στις προτιμώμενες πηγές σας. Μπορείτε να το κάνετε πηγαίνοντας εδώ.











