Τον εύκολο και γρήγορο τηλεχειρισμό ρομπότ επιτρέπει καινοτόμο interface του Georgia Tech στις ΗΠΑ, καθιστώντας τον μια εύκολη διαδικασία «point and click».
Τα κλασικά interfaces που χρησιμοποιούνται για αυτή τη δουλειά μπορεί να είναι εντάξει για ειδικούς σε θέματα ρομποτικής, αλλά είναι εξαιρετικά δύσχρηστα για τους μη ειδικούς- και σίγουρα δεν ενδείκνυνται στο πλαίσιο της όλο και πιο διευρυνόμενης χρήσης ρομπότ στον κόσμο (που περιλαμβάνει πχ και ηλικιωμένους οι οποίο χρησιμοποιούν ρομπότ για να τους βοηθούν στο σπίτι).
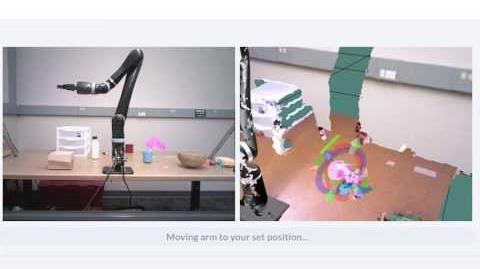
Το νέο interface, που σχεδιάστηκε από ερευνητές του Georgia Institute of Technology, είναι πολύ πιο απλό, πιο αποτελεσματικό και δεν απαιτεί πολύ χρόνο εκπαίδευσης: Ο χρήστης απλά πηγαίνει τον κέρσορα εκεί που θέλει και κάνει κλικ στο αντικείμενο που επιθυμεί, και στη συνέχεια επιλέγει την εντολή «πιάσε». Το ρομπότ κάνει τα υπόλοιπα.
«Αντί για μια σειρά περιστροφών, ανύψωσης και χαμηλώματος βελών, ρύθμισης της δύναμης πιασίματος και εκτιμήσεων για το σωστό βάθος πεδίου, περιορίσαμε τη διαδικασία σε μόλις δύο κλικ» λέει σχετικά η Σόνια Τσέρνοβα, βοηθός καθηγήτρια στο School of Interactive Computing.

Η ομάδα της πραγματοποίησε δοκιμές με φοιτητές και στα δύο συστήματα, και διαπίστωσε πως η μέθοδος «point and click» είχε ως αποτέλεσμα πολύ λιγότερα λάθη, επιτρέποντας στους χρήστες να πραγματοποιούν εργασίες πολύ πιο γρήγορα και με μεγαλύτερη αξιοπιστία σε σχέση με την «παραδοσιακή» μέθοδο.
«Οι ρομποτιστές σχεδιάζουν μηχανήματα για εξειδικευμένες εργασίες, μετά συχνά τα δίνουν σε ανθρώπους που ξέρουν λιγότερα από αυτούς για τον έλεγχό τους» λέει ο Ντέιβιντ Κεντ, ο διδακτορικός φοιτητής που ηγήθηκε του προγράμματος.
«Οι περισσότεροι θα δυσκολεύονταν να χειριστούν εικονικά χειριστήρια εάν χρειάζονταν να βάλουν ένα ρομπότ να πιάσει τα φάρμακά τους. Αλλά point and click στο μπουκαλάκι; Αυτό είναι πολύ ευκολότερο».
Το συγκεκριμένο interface δεν περιλαμβάνει 3-D mapping, όπως τα άλλα, «συμβατικά» συστήματα, αλλά παρέχει μόνο την εικόνα από την κάμερα, με αποτέλεσμα να είναι ευκολότερος ο χειρισμός από τον χρήστη.
Όταν αυτός κάνει κλικ σε μια περιοχή όπου βρίσκεται ένα αντικείμενο, ο αλγόριθμος αντίληψης του ρομπότ αναλύει την τρισδιάστατη γεωμετρία της επιφάνειας του αντικειμένου, για να δει από πού και πώς πρέπει να το πιάσει. Μετά ο υπολογιστής προτείνει κάποιους τρόπους πιασίματος. Ο χρήστης αποφασίζει και το ρομπότ αρχίζει τη διαδικασία.
Πέρα από τη χρήση σε σπίτια, οι ερευνητές οραματίζονται εφαρμογές σε τομείς όπως η έρευνα και διάσωση και η εξερεύνηση του διαστήματος. Το interface διατίθεται ως λογισμικό open source, ενώ παρουσιάστηκε σε συνδιάσκεψη (HRI2017) στη Βιέννη στις αρχές του Μαρτίου.
Για να εμφανίζονται περισσότερα άρθρα της Ναυτεμπορικής στις αναζητήσεις σας εύκολα και γρήγορα, πρέπει να προσθέσετε το site στις προτιμώμενες πηγές σας. Μπορείτε να το κάνετε πηγαίνοντας εδώ.