Τα ρομπότ ήταν ανέκαθεν δημοφιλή στα παιδιά- ωστόσο, εδώ και καιρό η ρομποτική σε σχέση με τις μικρές ηλικίες ξεπερνά το πλαίσιο των παιχνιδιών, και χαρακτηριστικό παράδειγμα για αυτό είναι η περίπτωση του KidsArm.
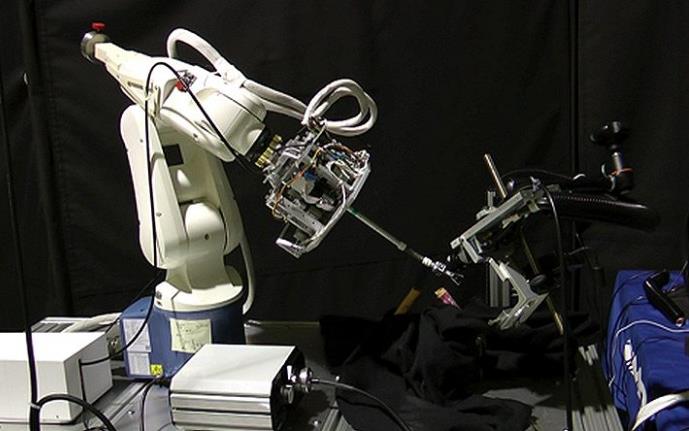
Η εν λόγω ρομποτική πλατφόρμα αναπτύχθηκε από εταιρείες που ανέπτυξαν ρομποτικούς βραχίονες οι οποίοι χρησιμοποιήθηκαν για την κατασκευή του Διεθνούς Διαστημικού Σταθμού. Πρόκειται για ένα χειρουργικό παιδιατρικό ρομπότ, που επιτρέπει στους χειριστές του τη γρήγορη πλοήγηση σε σημεία του σώματος τα οποία χρήζουν χειρουργικής επέμβασης. Διαθέτει προηγμένο σύστημα imaging και ελέγχου που το καθιστά εξαιρετικά ακριβές και είναι σχεδιασμένο για να εξερευνήσει τις δυνατότητες περί αυτοματοποίησης κάποιων δύσκολων διαδικασιών παιδιατρικής χειρουργικής με την ελάχιστη δυνατή επεμβατικότητα.
«Οι δοκιμές μας δείχνουν ότι μπορούμε να πραγματοποιήσουμε επεμβάσεις σε μικροσκοπικές δομές όπως αιμοφόρα αγγεία χωρίς να προκαλούμε ζημιά» αναφέρει ο Τόμας Λόοι, διευθυντής προγράμματος για έναν εκ των φορέων που ανέπτυξαν το KidsArm στο Hospital for Sick Children (SickKids) Centre for Image-Guided Innovation & Therapeutic Intervention (CIGITI) στο Τορόντο του Καναδά. «Ο στόχος του ρομποτικού βραχίονα είναι να βοηθά τους γιατρούς να πραγματοποιούν κάποιες επεμβάσεις πολύ γρηγορότερα από ό,τι θα το έκαναν μόνο με τα χέρια τους και με αυξημένη ακρίβεια. Κάποιες θα μπορούσαν να γίνονται αυτόνομα. Αν και δεν έχουμε φτάσει ακόμα εκεί, το KidsArm μπορεί να κάνει πέντε ράμματα αυτόνομα».
Για την ανάπτυξη του KidsArm, το SickKids συνεργάστηκε με την MacDonald, Dettwiler and Associates Ltd (MDA), την καναδική εταιρεία που βρισκόταν πίσω από τον ρομποτικό βραχίονα του διαστημικού λεωφορείου και ανέπτυξε το ρομποτικό σύστημα στον διαστημικό σταθμό για την Καναδική Διαστημική Υπηρεσία (CSA). Τα συγκεκριμένα διαστημικά ρομπότ (Canadarm, Canadarm 2 , Dextre) αποτελούν μία σειρά ρομπότ για βαριές εργασίες και συντήρηση, που είναι μεγάλης σημασίας για τον ISS.

Το KidsArm αποτελεί τον πρώτο ρομποτικό χειρουργικό βραχίονα ειδικά σχεδιασμένο για παιδιατρικές ειδικότητες, περιλαμβανομένων της καρδιοχειρουργικής, της νευροχειρουργικής κ.α. Οι χειρούργοι χειρίζονται το εργαλείο με ένα ζευγάρι χειριστηρίων χειρός σε συνδυασμό με τεχνολογία imaging υψηλής ακριβείας. Οι εικόνες βοηθούν στον εντοπισμό της περιοχής ενδιαφέροντος, έτσι ώστε να διευκολύνεται η μεταχείριση ευαίσθητων αγγείων. Επίσης, σημαντικό τμήμα της πλατφόρμας είναι το vision-based σύστημα το οποίο μπορεί να λειτουργήσει αυτόνομα, ενεργώντας ως τα «μάτια» και ο «εγκέφαλος» του ρομπότ- και στο οποίο επικεντρώνονται οι έρευνες.
Το KidsArm αποτελείται επίσης από άλλα δύο στοιχεία: ένα εξωτερικό positioning σύστημα το οποίο βρίσκεται εκτός του ασθενούς και έναν χειρουργικό βραχίονα που κινείται στο εσωτερικό του. Το εξωτερικό σύστημα χρησιμοποιεί ένα βιομηχανικό ρομπότ το οποίο έχει τροποποιηθεί έτσι ώστε να υποστηρίζει έναν αυτοματοποιημένο χειρουργικό βραχίονα και συσκευή ραμμάτων. Ο χειρουργικός βραχίονας είναι το μόνο τμήμα που εισέρχεται στο σώμα τους ασθενούς- και είναι όσο πιο μικρός γίνεται, διατηρώντας παράλληλα την απαιτούμενη επιδεξιότητα.
Μακροπρόθεσμα, το KidsArm μπορεί να οδηγήσει σε καλύτερα αποτελέσματα για ασθενείς, καθώς και στη δυνατότητα πιο έγκαιρης επέμβασης- ή και επεμβάσεων σε μικρότερη κλίμακα. Όλα αυτά θα είχαν ως αποτέλεσμα τη μείωση του κόστους, ωστόσο απαιτείται περαιτέρω ανάπτυξη για να καθοριστεί το πώς θα μπορούσε να βελτιστοποιηθεί η χρησιμότητά του σε ένα σύστημα υγείας.
Για να εμφανίζονται περισσότερα άρθρα της Ναυτεμπορικής στις αναζητήσεις σας εύκολα και γρήγορα, πρέπει να προσθέσετε το site στις προτιμώμενες πηγές σας. Μπορείτε να το κάνετε πηγαίνοντας εδώ.