Επιστήμονες του Princeton University ανέπτυξαν ένα αυτοματοποιημένο σύστημα με ραντάρ που επιτρέπει στα αυτοκίνητα να «κοιτούν» πίσω από γωνίες, εντοπίζοντας εύκολα άλλα εισερχόμενα οχήματα και πεζούς.
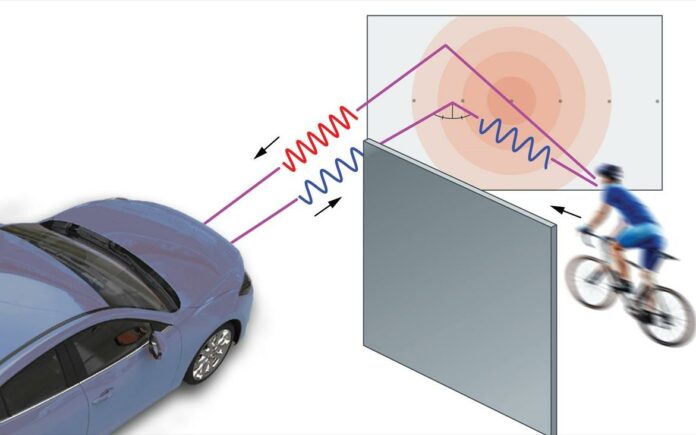
Το σύστημα αυτό, όπως υποστηρίζεται, ενσωματώνεται εύκολα σε σημερινά οχήματα και χρησιμοποιεί ραντάρ Doppler για να ανακλά ραδιοκύματα σε επιφάνειες όπως κτίρια και παρκαρισμένα αυτοκίνητα. Το σήμα ραντάρ πέφτει στην επιφάνεια υπό γωνία, οπότε αντανακλάται σαν μια μπάλα μπιλιάρδου που πέφτει στο τοίχωμα του τραπεζιού. Το σήμα χτυπά μετά και σε άλλα αντικείμενα πίσω από τη γωνία, και μέρος του επιστρέφει στο αυτοκίνητο, όπου εντοπίζεται- επιτρέποντας στο σύστημα να «δει» αντικείμενα πίσω από τη γωνία, και να αντιληφθεί εάν κινούνται ή είναι στατικά.
«Αυτό θα επιτρέψει σε αυτοκίνητα να βλέπουν “κρυμμένα” αντικείμενα τα οποία τα σημερινά lidar και αισθητήρες καμερών δεν μπορούν να καταγράψουν, για παράδειγμα, επιτρέποντας σε ένα αυτόνομο όχημα να “δει” γύρω σε μια επικίνδυνη διασταύρωση» είπε ο Φίλιξ Χάιντε, επίκουρος καθηγητής Επιστήμης Υπολογιστών στο Princeton και ένας εκ των ερευνητών. «Οι αισθητήτες ραντάρ είναι σχετικά χαμηλού κόστους, ειδικά σε σχέση με τους αισθητήρες lidar, και μπορεί να αλλάξει η κλίμακα για μαζική παραγωγή».
Οι ερευνητές παρουσίασαν τη δουλειά τους σε επιστημονικό άρθρο στην Conference on Computer Vision and Pattern Recognition (CVPR), όπου περιγράφουν πώς το σύστημα είναι σε θέση να διακρίνει αντικείμενα μεταξύ των οποίων αυτοκίνητα, ποδηλάτες και πεζοί, και να υπολογίζει την κατεύθυνση και ταχύτητά τους. «Η προτεινόμενη προσέγγιση επιτρέπει προειδοποίηση σύγκρουσης για πεζούς και ποδηλάτες σε σενάρια αυτόνομης κίνησης στον πραγματικό κόσμο- πριν τα δει κανείς με υπάρχοντες αισθητήρες απευθείας οπτικής επαφής» έγραψαν οι ερευνητές.

Τα τελευταία χρόνια μηχανικοί έχουν αναπτύξει διάφορα συστήματα αισθητήρων που επιτρέπουν σε αυτοκίνητα να εντοπίζουν άλλα αντικείμενα στον δρόμο. Πολλοί από αυτούς βασίζονται σε lidar ή κάμερες, χρησιμοποιώντας ορατό ή σχεδόν υπέρυθρο φως, και τέτοιοι αισθητήρες για αποτροπή σύγκρουσης είναι πλέον κοινοί στα σύγχρονα αυτοκίνητα. Ωστόσο με τέτοιες μεθόδους είναι δύσκολος ο εντοπισμός αντικειμένων εκτός οπτικού πεδίου του αυτοκινήτου. Σε προηγούμενες έρευνες η ομάδα του Χάιντε είχε χρησιμοποιήσει φως για να δει αντικείμενα κρυμμένα πίσω από γωνίες. Ωστόσο αυτές οι προσπάθειες αυτή τη στιγμή δεν είναι πρακτικές για χρήση σε αυτοκίνητα, τόσο επειδή προϋποθέτουν ισχυρά λέιζερ όσο και επειδή περιορίζονται σε μικρές αποστάσεις. Αντ’αυτού, οι ερευνητές χρησιμοποίησαν εδώ imagining radar, το οποίο αποτελεί δοκιμασμένη τεχνολογία, αναπτύσσοντας παράλληλα ειδικούς αλγορίθμους για την ερμηνεία των δεδομένων ώστε να μπορούν να λειτουργούν αποτελεσματικά οι αισθητήρες.
«Οι αλγόριθμοι που αναπτύξαμε είναι πολύ αποτελεσματικοί και ταιριάζουν στην επόμενη γενιά συστημάτων αυτοκινήτου…οπότε μπορεί να δείτε αυτή την τεχνολογία από την επόμενη γενιά οχημάτων» είπε σχετικά ο Χάιντε.
Για να εμφανίζονται περισσότερα άρθρα της Ναυτεμπορικής στις αναζητήσεις σας εύκολα και γρήγορα, πρέπει να προσθέσετε το site στις προτιμώμενες πηγές σας. Μπορείτε να το κάνετε πηγαίνοντας εδώ.