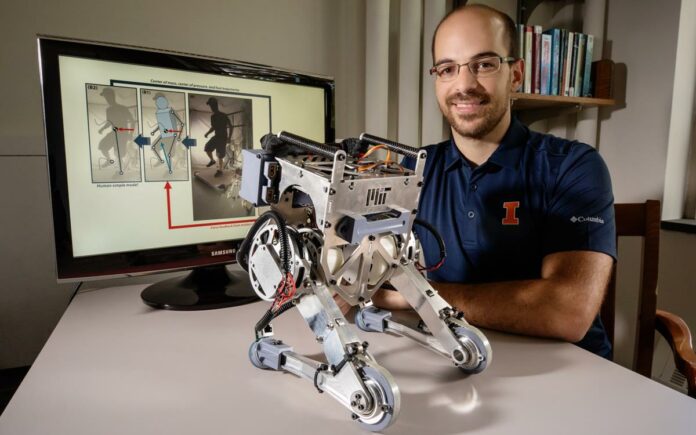
Little Hermes (Μικρός Ερμής) είναι το όνομα ενός δίποδου ρομπότ από μηχανικούς του University of Illinois at Urbana-Champaign και του MIT το οποίο μπορεί να περπατά, να τρέχει, να πηδάει και να αλληλεπιδρά με το περιβάλλον του σε συγχρονισμό με τον άνθρωπο χειριστή του, «αναπαράγοντας» την αίσθηση ισορροπίας και τα αντανακλαστικά του.
Ο Γιοάο Ράμος, καθηγητής μηχανολόγων μηχανικών και πρώην ερευνητής του ΜΙΤ συνεργάστηκε με τον Σανγκμπέι Κιμ του ΜΙΤ για την ανάπτυξη του ρομπότ, που προορίζεται για αποστολές σε μέρη που είναι επικίνδυνα για τους ανθρώπους. Οι ερευνητές παρουσιάζουν τη δουλειά τους στο Science Robotics.
«Μας ενέπνευσε ο σεισμός του 2011 στο Τοχόκου της Ιαπωνίας, το τσουνάμι και η πυρηνική καταστροφή στον σταθμό Φουκουσίμα Νταΐτσι» είπε ο Ράμος. «Σκεφτήκαμε πως αν ένα ρομπότ μπορούσε να είχε μπει στον σταθμό μετά την καταστροφή, τα πράγματα θα μπορούσαν να είχαν εξελιχθεί διαφορετικά. Το συμβάν αυτό ήταν “καμπανάκι” για την κοινότητα της ρομποτικής» πρόσθεσε.
Μεγάλο μέρος της παρούσας έρευνας στα τηλεχειριζόμενα ρομπότ δεν περιλαμβάνει την παροχή force-feedback πληροφοριών στον χειριστή, τόνισε ο Ράμος. Εάν τα υποβοηθούμενα από ανθρώπους ρομπότ είναι να αλληλεπιδρούν με το περιβάλλον με τρόπο που μπορεί να συγκριθεί με αυτόν των ανθρώπων, σημείωσε, οι χειριστές θα πρέπει να νιώθουν τις ίδιες δυνάμεις που «νιώθει» το ρομπότ.

Όπως αναφέρεται στην ιστοσελίδα του University of Illinois, η ομάδα ανέπτυξε μια στολή motion-capture, η οποία είναι σαν εξωσκελετός που φοριέται από άνθρωπο χειριστή. Η στολή καταγράφει τις κινήσεις του χειριστή και τις δυνάμεις που ασκεί στο περιβάλλον για να κινηθεί και μεταφέρει αυτά τα δεδομένα στο ρομπότ, που αναπαράγει την κίνηση με ελάχιστη ή και μηδενική καθυστέρηση.
Ωστόσο, τα ρομπότ δεν έχουν έμφυτη αίσθηση ισορροπίας όπως ένας άνθρωπος, οπότε ο χειριστής εξοπλίζεται με ένα γιλέκο το οποίο στέλνει πληροφορίες force-feedback από το ρομπότ σε αυτόν. «Αν το ρομπότ αρχίσει να πέφτει, ο χειριστής νιώθει ένα σπρώξιμο προς αυτή την κατεύθυνση μέσω του γιλέκου» είπε ο Ράμος. «Φυσικά η αντίδραση του χειριστή είναι να κάνει ένα βήμα για να ανακτήσει την ισορροπία του, και το ρομπότ κάνει το ίδιο, με συγχρονισμό, αποφεύγοντας να πέσει».
Μεγάλο μέρος της έρευνας στη ρομποτική επικεντρώνεται στην ανάπτυξη πλήρως αυτόματων/ αυτόνομων μονάδων, σημείωσε ο Ράμος. «Πιστεύω πως θα επιτύχουμε πλήρως αυτόνομα ρομπότ κάποια στιγμή, μα αυτό είναι ακόμα αρκετά μακριά στο μέλλον. Έχει πλεονεκτήματα το να συνεχίσουμε να δουλεύουμε με τηλεχειριζόμενα από ανθρώπους ρομπότ, αντί να στρέψουμε όλες μας τις προσπάθειες στον προγραμματισμό πλήρως αυτόνομης ρομποτικής τεχνολογίας. Με αυτόν τον τρόπο, οι άνθρωποι διατηρούν ένα σημαντικό επίπεδο ελέγχου».
Προς το παρόν ο τηλεχειρισμός του Little Hermes γίνεται ενσύρματα, ωστόσο οι ερευνητές σκοπεύουν να πάνε παραπέρα, χρησιμοποιώντας ασύρματη τεχνολογία, όπως στα drones. «Σχεδιάζουμε επίσης να αναπτύξουμε συσκευές force feedback από το ρομπότ στον άνθρωπο για άλλα τμήματα του σώματος, όπως τα πόδια και τα χέρια» είπε ο Ράμος. «Επιπλέον, ό,τι έχουμε αναπτύξει ως τώρα δεν περιορίζεται στα δίποδα ρομπότ- οποιοδήποτε κομμάτι της τεχνολογίας μεταφέρεται εύκολα σε άλλα συστήματα, όπως τετράποδα και τροχοφόρα ρομπότ».
Για να εμφανίζονται περισσότερα άρθρα της Ναυτεμπορικής στις αναζητήσεις σας εύκολα και γρήγορα, πρέπει να προσθέσετε το site στις προτιμώμενες πηγές σας. Μπορείτε να το κάνετε πηγαίνοντας εδώ.